![]()

 AnyBody 应用案例
AnyBody 应用案例
外骨骼型机器人
① 概要
机械外骨骼或称动力外骨骼(Powered exoskeleton),是一种由钢铁框架构成的可穿戴机器装置,能够为穿戴者的四肢运动提供额外动力。它广泛应用于康复、护理和搬运重物等领域。
本应用案例旨在在AnyBody中创建一款支持下肢关节屈曲伸展动作的外骨骼型机器人,并进行步行分析,以评估该设备在下肢肌肉运动中的作用。

数据 :
・ 步行周期:1.2秒
・ 被试者的体重:65kg
・ 身高:170cm
・ 重力:9.81m/s2
② 外骨骼型机器人的模型化
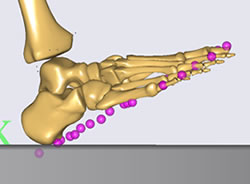 ■ 地面反力
■ 地面反力
在该模型中,同时采集了动作捕捉数据和测力台数据。
如果直接将动作捕捉数据应用于穿戴外骨骼的人体模型,就会忽略外骨骼本身的重量,导致计算出的地面反力不准确,因此这种方法不可行。
为此,我们需要寻找替代方案。AnyBody提供了一个功能,可以预测地面反作用力,这个功能称为“GRFPrediction”。
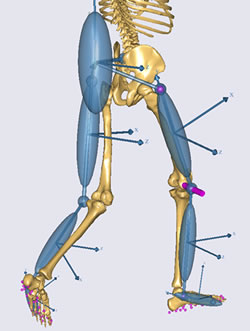 ■ 机器人
■ 机器人
该机器人由7个体节构成,总质量为12kg。
此外,为了不约束人体模型脚的外翻/外旋动作,我们定义了以下关节:
骨关节:球型关节(Ball Joint)
膝盖:旋转关节(Revolute Joint)
脚踝:球型关节(Ball Joint)
通过定义输入条件和约束条件,使人体模型中的行走行为能够准确反映实际行走动作。
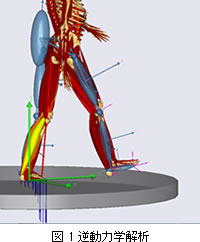 ■ 外骨骼动力
■ 外骨骼动力
外骨骼动力以扭矩的形式在关节处传递给人体。为了计算这些扭矩,首先将不提供动力的外骨骼穿戴在人体模型上,然后进行逆动力学分析(图1)。
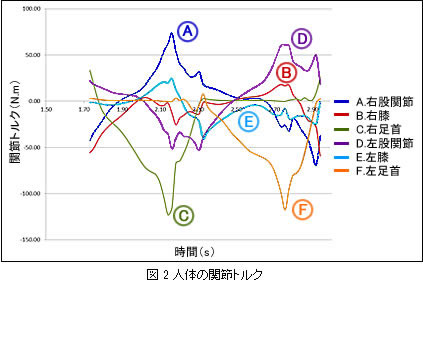
通过这种方式,可以得到考虑外骨骼质量后的人体关节扭矩(图2)
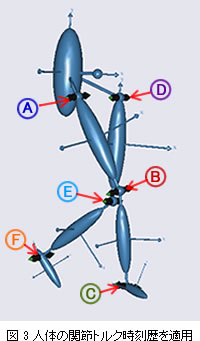
随后,将这些扭矩应用到外骨骼的关节处(图3)。
② 结果
 右侧的动画展示了开启外骨骼动力后的步行分析。
右侧的动画展示了开启外骨骼动力后的步行分析。
未穿外骨骼时,腓肠肌的激活度较高,但在开启动力后,腓肠肌的激活度显著降低,达到正常水平。

对比两组肌肉激活度,开启外骨骼动力后,腓肠肌的最大激活度从38%下降到10%。
此外,整体的肌肉动员模式发生了变化,腓骨肌成为主要肌肉,而不是腓肠肌。从图中2.4到2.6秒的时间段可以看出,某些肌肉在外骨骼的影响下几乎不活动。尽管没有图示,但关节反力也显示出类似的下降效果。
 尽管使用了理想的外骨骼动力,但右腿的肌肉活动量并未降至零。这是因为外骨骼未支持腿部关节的外翻/外旋动作。
尽管使用了理想的外骨骼动力,但右腿的肌肉活动量并未降至零。这是因为外骨骼未支持腿部关节的外翻/外旋动作。
③ 总结
通过分析可以推测肌肉的使用方式(肌肉的用法)和肌肉激活度(或人体的反应)。AnyBody在设计方面提供了以下帮助:
・模型的灵活性
・冗余系统的无缝对接
・经验证的地面反力推测功能
・短计算时间下大量人体模型的验证研究
此外,可以使用AnyBody进行以下分析:
外骨骼与人体交互建模
外骨骼动力或工作模式的验证
不同模式的分析,如肌肉缺失情况(残疾人)
步行以外的动作或更复杂工作的类型
这极大地帮助设计者理解外骨骼在人体运动中的作用和影响,发现潜在问题,并进行相应的优化。